Humanoid robot data · 13 June 2026
Data Collection Grippers for Robot Training Data: What to Compare
Data collection grippers are becoming their own product category. They sit between the human hand and the robot hand: part gripper, part camera rig, part pose tracker, part tactile sensor, and part logging system.
That matters because manipulation data is not only video of someone picking up an object. Useful robot training data needs the relationship between what the operator saw, what the hand or gripper did, when contact happened, how the object moved, and whether the task succeeded. A good data collection gripper makes that relationship easier to capture. A weak one gives you a nice demo video and a lot of missing context.
This article looks at the current market through the source links supplied for GenRobot, AgileX, DOBOT, Noematrix, RoboPocket, Lumos, IO-AI, USTAR, SVRC, Eurecat, ChangingTek, and Xense Robotics. The goal is not to crown a winner. It is to show what buyers should compare before they treat any gripper-generated dataset as training-ready.
If this is the first article you are reading on the topic, start with the broader guide to humanoid robot data collection equipment. For dataset diligence after a seller sends sample files, use the checklist for evaluating humanoid robot training data.
What a data collection gripper should preserve
The useful question is not "does it grip?" The useful question is: what does it preserve at each timestep?
For robot learning, a data collection gripper can be valuable when it records:
- Egocentric or wrist-view video from the manipulation viewpoint.
- Depth, pose, IMU, or 6D trajectory data.
- Gripper opening, joint angles, finger pose, or hand state.
- Contact timing, tactile pressure, slippage, deformation, or force signals.
- Audio, voice annotations, task labels, and episode boundaries.
- Export formats that a training team can actually load, such as HDF5, MCAP, LeRobot-style data, or a documented ROS pipeline.
The difference between these signals is not cosmetic. Vision can show that a block moved. Tactile sensing can show when the gripper first made contact, whether the object slipped, and how force changed during the lift. Pose tracking can turn a human demonstration into robot action targets. Annotation can turn a raw clip into an instruction-following example.
That is why these products should be compared as data systems, not as accessories.
GenRobot DAS Gripper
GenRobot's DAS Gripper is positioned as a multimodal handheld data collection device. The source page lists RGB images from a triple-camera setup, depth maps, IMU data, spatial trajectory, microphone audio, tactile information, gripper angle, and gripper opening distance. It also lists a dual-finger gripper with 100 Hz output, a 100 mm maximum opening, 2.5 kg maximum gripping force, 64 GB TF-card storage, Wi-Fi and Type-C communication, and about three hours of battery life.
The buyer note is simple: this is a broad manipulation-capture device, not just a mechanical end effector. Its value depends on whether GenRobot's export pipeline keeps video, depth, tactile, pose, audio, and gripper state aligned in one episode timeline. The source page has internal inconsistencies around weight and trajectory accuracy, so I would quote those only after confirming a datasheet.
DAS Gripper product video. Source: GenRobot DAS Gripper.
GenRobot DAS Fingers
GenRobot's DAS Fingers narrows the idea into a lightweight two-finger bionic collection device. The page lists RGB images, IMU data, spatial positioning trajectory, microphone audio, tactile information, finger opening, 3.5 hours of battery life, 42 GB storage, Wi-Fi, Bluetooth, Type-C, a 220 mm maximum opening, and 2 kg maximum gripping force.
This shape matters. A two-finger device can be efficient for grasping, object transfer, and simple manipulation demonstrations, but it will not replace a full dexterous hand dataset. The source also makes performance claims around efficiency and capture success rate without publishing enough methodology on the page, so those are best treated as vendor claims rather than benchmark facts.

DAS Fingers product still. Source: GenRobot DAS Fingers.
DAS Fingers video. Source: GenRobot DAS Fingers.
GenRobot DAS Dex
GenRobot's DAS Dex moves from gripper capture toward dexterous hand capture. The page lists 23 DoF, fingertip trajectories, 3D tactile data, joint angles, hand spatial localization trajectories, high-definition hand imaging, 200 Hz output frequency, 1 ms signal latency, a 150-degree wrist camera field of view, 0.05 N tactile sensitivity, and 1 mm tactile spatial resolution.
For humanoid manipulation data, this is the most interesting GenRobot source because it records hand state and contact in more detail than a two-finger gripper. The key diligence question is embodiment fit: how those 23 DoF map to the target robot hand, how operator hand size affects capture, and whether the exported joint and tactile streams are documented enough for retargeting.

DAS Dex product still. Source: GenRobot DAS Dex.
DAS Dex product video. Source: GenRobot DAS Dex.
AgileX PIKA
AgileX PIKA is presented as a portable data collection gripper and Universal Manipulation Interface. The page separates the system into PiKA Sense, the handheld unit; Pika Gripper, the robotic end effector; and Pika Station, the positioning base. It lists 6D spatial data, RGB imagery, depth, IMU data, dual-camera sensing, Type-C interface, ROS1, ROS2 and URDF support, plug-and-play modularity, and calibration-free operation claims.
PIKA is a good example of the handheld-to-robot pattern: a human collects the demonstration with one device, then the robot-side gripper and software stack make the data useful for policy work. Buyers should verify camera and depth specs, SDK maturity, calibration assumptions, gripper compatibility, and how the station changes the capture workflow.

PIKA product visual. Source: AgileX PIKA.
PIKA animated workflow visual. Source: AgileX PIKA.
DOBOT Pocket Go listing
The supplied RobotShop DOBOT Pocket Go listing was not accessible during source review. Direct fetches timed out or returned a security verification page, and search results did not provide enough reliable product-page detail to cite specs or media from that exact listing.
That is still useful diligence signal. If a buyer is comparing a retailer listing with manufacturer materials, the minimum next step is to request the datasheet, product images, export formats, included sensors, warranty terms, and software support directly from DOBOT or the distributor. I would not put Pocket Go into a spec comparison table until those details are verified from an accessible source.
Noematrix CoMiner
Noematrix CoMiner is a system-level data collection suite rather than a single gripper SKU. The source page positions it for teleoperated robot data collection and in-the-wild real-world data collection. It lists modular joints and customizable links, over 1,000 data entries per day per unit, joint-space mapping without inverse kinematics, images, joint angles, force torque, motion trajectories, USB, Wi-Fi, Ethernet, and an edge controller configuration using RK3588 with SSD storage.
This is the kind of product a data team should evaluate as workflow infrastructure. The question is not only how the gripper feels in the hand. It is whether CoMiner's hardware, controller, data management, training, and deployment tools can fit the buyer's robot fleet without locking the dataset into an opaque pipeline.

CoMiner product banner. Source: Noematrix CoMiner.
CoMiner teleoperated data collection visual. Source: Noematrix CoMiner.
RoboPocket
RoboPocket is a research project, not a normal commercial gripper page. Its contribution is robot-free instant policy iteration using a consumer smartphone, an adaptive gripper, visual-inertial odometry, AR visual foresight, and online policy finetuning. The project page reports an iPhone Pro edge-compute hub, 60 Hz AR rendering, a roughly $70 bill of materials, 2.8 mm position error, 0.4 degree rotation error, and 1,600 demonstrations across 64 environment-object pairs.
The market implication is important. RoboPocket points toward active data collection, where the operator does not only record demonstrations. The operator sees predicted failures, corrects them, uploads better data, and watches the policy improve. If commercial tools adopt that feedback loop, buyers will start comparing collection systems by learning speed, not only sensor count.

RoboPocket hardware architecture. Source: RoboPocket project page.
RoboPocket teaser video. Source: RoboPocket project page.
Lumos FastUMI Pro
Lumos FastUMI Pro is a UMI-based multimodal data collection system. The source lists non-parallel, parallel, and force-controlled gripper variants, optional tactile sensor modules, an optional Lumos Ego head-mounted camera, fisheye RGB, depth, IMU, 6-DoF pose trajectory, roughly 600 g weight, 1 to 3 mm spatial positioning accuracy, and 2 kg maximum payload.
This is a strong example of the modular UMI direction. A buyer can choose the gripper style and decide whether tactile or egocentric capture is needed. That flexibility is valuable, but it also creates procurement risk: two teams can both say they collected "FastUMI Pro data" while using different gripper variants, tactile modules, and camera setups. The dataset card needs to record the exact configuration.

FastUMI Pro product still. Source: Lumos FastUMI Pro.
FastUMI Pro video. Source: Lumos FastUMI Pro.
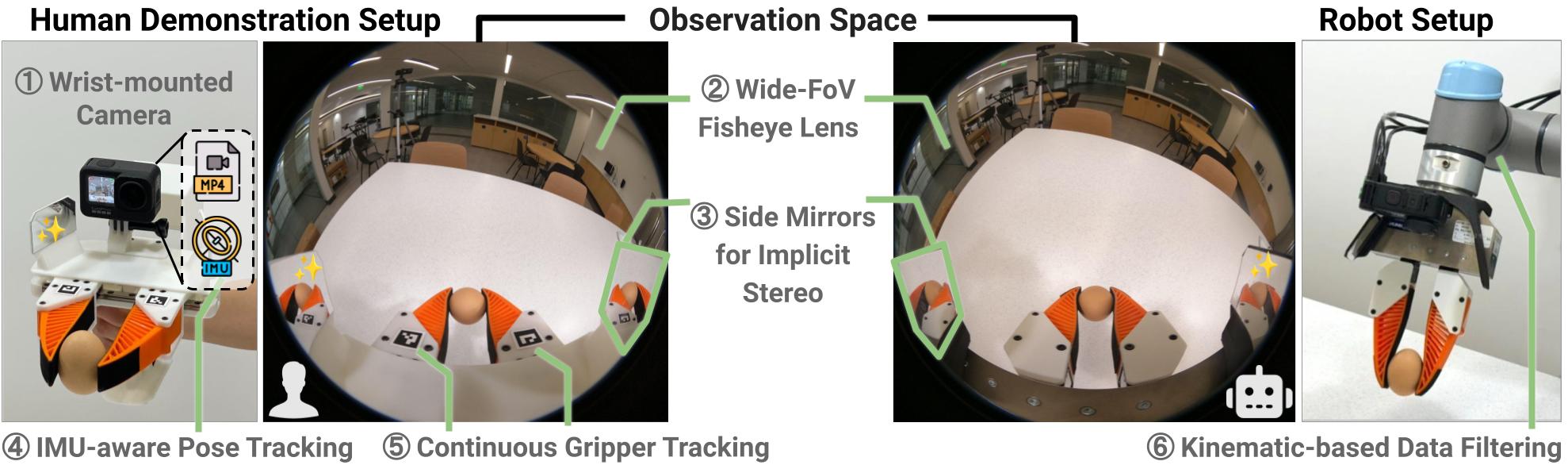
IO-AI SenseXperience
IO-AI SenseXperience is framed as a configurable real-world human data capture stack for robotics foundation models and world models. The baseline configuration includes an egocentric unit, wrist unit, gripper unit, and compute unit. The page lists egocentric video, wrist-view observations, gripper interactions, audio, IMU, and extensions for motion capture and tactile sensing. It also connects the hardware to EmbodiFlow for timestamp alignment, pose estimation, gesture recognition, review, and export to LeRobot, HDF5, and MCAP.
This is one of the more training-pipeline-aware sources in the set. Export formats and review workflows matter because the cost of data is not only collection. It is cleaning, aligning, validating, and getting the data into a model training job without weeks of reverse engineering.
SenseXperience product still. Source: IO-AI SenseXperience.
SenseXperience product video. Source: IO-AI SenseXperience.
USTAR T-Grip Suite
USTAR's products page lists T-Grip Suite as a handheld collection gripper for robot manipulation research, embodied AI training, teleoperation replay, and imitation learning. The page names use cases such as assembly, grasping, insertion, and cable handling. It also refers to vision, tactile or contact, IMU streams, pose, gripper state, action timeline, task annotations, diffusion policy dataset preparation, teleoperation replay, behavior cloning, and LeRobot-style organization.
The source is more application-forward than spec-forward. That can be helpful for a buyer trying to map a tool to tasks, but it is not enough for hardware comparison. Before buying, ask for the exact sensors, control rates, camera placement, tactile hardware, calibration process, and sample data exports.

USTAR data pipeline visual. Source: USTAR products page.
SVRC UMI
SVRC UMI is the most direct low-cost UMI-style store listing in the source set. The page lists a plug-and-play UMI gripper pair for collecting manipulation demonstrations, $1,000 per pair, 1 to 2 week shipping, a GoPro Hero 11 or 12 wrist camera mount with camera included, ArUco marker-based 6-DoF pose tracking, compatibility with 6 or 7 DoF arms, and readiness for LeRobot, ACT, and Diffusion Policy.
The buyer tradeoff is clear. SVRC UMI looks practical for labs that want a ready pair of UMI grippers and camera hardware without building from scratch. It is not positioned as a tactile-rich system, so it is a better fit for vision and pose demonstration datasets than for slip, force, or contact-state studies.
SVRC UMI product image. Source: Robotics Center of Silicon Valley.
Eurecat UMI-LINGO
Eurecat's UMI-LINGO page describes an open, modular handheld gripper and multimodal dataset for natural-language-guided robot manipulation. UMI-LINGO stands for Universal Manipulation Interface Leveraging Language for Guided Operations. The page names natural language instructions, visual inputs, tactile sensing, auditory sensing, and a workflow where one user describes a task from before-and-after images while another executes it from spoken instruction.
This source is useful because it connects gripper capture to language grounding. A dataset for future household or industrial assistants may need more than motion and video. It may need the spoken instruction, the intended before-and-after state, and evidence that another human could execute the task from that language.

UMI-LINGO project visual. Source: Eurecat UMI-LINGO.
ChangingTek tactile gripper context
The supplied ChangingTek article is company and alumni context, not a product spec page for a data collection gripper. It does, however, link to related 2026 news items for YouCai and UHand data acquisition grippers, with headlines around high-precision tactile perception and multimodal synchronous data collection.
The safe use of this source is market context: ChangingTek is positioning tactile grippers around the embodied-intelligence data loop. The unsafe use would be to infer payload, frequency, tactile resolution, export format, or compatibility from a related-news thumbnail. For publishable comparisons, the linked YouCai and UHand pages need their own source review.

Related tactile gripper image linked from the ChangingTek news page. Source: ChangingTek Robotics.
Xense Robotics TacCap-Gripper
The Xense Robotics PRNewswire release announced TacCap-Gripper at ICRA 2026 in Vienna. The release describes it as a wearable two-finger tactile data acquisition device integrating a high-precision visuo-tactile sensor, IMU, and high-resolution encoder. It says the device captures robot motion, vision, touch, contact start and end states, pressure distribution, material deformation, slippage trends, and force fluctuations.
This is the clearest tactile-intelligence source in the list. The useful claim is not that tactile data is nice to have. It is that some manipulation problems are under-observed by vision alone: flexible material handling, compliant assembly, slip recovery, and long-horizon contact-rich tasks. The press release is still broad, so buyers should ask for quantified sensor specs, sample episodes, and export schemas before treating it as a dataset source.

Xense Robotics ICRA 2026 tactile intelligence visual. Source: PRNewswire.
How I would compare these systems
The market is splitting into several types of collection gripper:
- Compact two-finger demonstrators, such as DAS Fingers, PIKA, SVRC UMI, and many UMI-style tools, are good for grasping and pick-place demonstrations when pose and wrist-view video are enough.
- Dexterous or tactile-rich systems, such as DAS Dex and TacCap-Gripper, matter when contact, slippage, deformation, and fine finger state are part of the learning problem.
- Full workflow suites, such as CoMiner and SenseXperience, should be judged by data pipeline quality as much as hardware quality.
- Research systems, such as RoboPocket and UMI-LINGO, show where the category is moving: active correction, language grounding, open tooling, and cheaper capture setups.
For buying or licensing data, I would ask every vendor the same practical questions:
- Can you show a raw sample episode with every stream included?
- Are timestamps shared across video, pose, gripper state, tactile, audio, and annotations?
- What calibration files, coordinate frames, and camera intrinsics are included?
- Which export formats are supported without using a closed viewer?
- Which gripper, camera, tactile module, and firmware version captured this dataset?
- Are failures, retries, and operator corrections preserved?
- Who owns the data, and can it be used for commercial model training?
Those questions are often more valuable than comparing payload numbers. A 2 kg gripper with clean synchronized data may be more useful than a stronger gripper with no documented schema.
What sellers should prepare
If you are selling data collected with one of these devices, prepare the dataset as a product, not as a folder dump. Include a short equipment card, a stream schema, calibration files, example loaders, task definitions, operator protocol, quality checks, rights information, and representative failure cases.
The best sellers will also explain what the data should not be used for. A UMI-style gripper dataset might be excellent for imitation learning on a parallel-jaw robot arm and weak for dexterous humanoid hand transfer. A tactile-rich gripper dataset might be valuable for slip recovery and poor for language planning. Buyers trust data more when its limits are visible.
If you are preparing a manipulation dataset for sale, the seller workflow on Humanoids Data is a useful next step. If you are buying and need help comparing vendors, start with a clear task description and a sample-file request before negotiating volume on the buyer side.