Humanoid robot data · 19 June 2026
Simulation Environments for Robot Training Data: What to Compare
In this guide
- What simulation can and cannot buy you
- The four layers of the simulator market
- Core engines and high-throughput simulators:
- NVIDIA and synthetic-data workflows:
- Robotics platforms and task frameworks:
- Scene simulators and benchmark suites:
- What to ask before buying simulation-generated data
- How to choose by use case
- The market implication for Humanoids Data
- Simulation environment comparison table
Simulation environments have moved from research tooling into the middle of the robot data market. A simulator is no longer just a place to test a controller before it touches hardware. It can be a source of synthetic demonstrations, labeled perception data, domain randomization, failure replay, policy evaluation, and sometimes the only practical way to collect rare or unsafe cases.
That does not make simulation data automatically useful. A beautiful scene can still produce weak robot training data if the physics are wrong, the robot model is simplified, the sensors are unrealistic, the asset rights are unclear, or the exported episodes cannot be aligned with real robot logs.
This guide compares the simulation environments a humanoid robotics team should know in 2026: Newton Physics, MuJoCo, Genesis World, NVIDIA Isaac Sim, PyBullet, Gazebo, and the wider stack around Isaac Lab, MuJoCo XLA, Brax, ManiSkill, SAPIEN, robosuite, Webots, CoppeliaSim, Drake, SOFA, Chrono, RaiSim, Habitat, AI2-THOR, iGibson, Omniverse Replicator, RLBench, Meta-World, Gymnasium Robotics, RoboCasa, and DeepMind Control Suite.
The useful question is not "which simulator is best?" The useful question is: best for what part of the data loop?
If you are new to the category, start with what humanoid robot training data is. For a closer look at what a simulator should export, the guide to data modalities for robot training explains why video, state, action, contact, labels, and provenance need to stay aligned. If you are already reviewing a dataset, the companion checklist on how to evaluate humanoid robot training data covers embodiment fit, rights, provenance, and delivery.
What simulation can and cannot buy you
Simulation helps most when the real world is expensive, dangerous, slow, rare, or hard to label.
For robot training data, it can produce:
- Perfect labels for RGB, depth, segmentation, pose, bounding boxes, optical flow, contact events, and object state.
- Large variations of the same task: lighting, object placement, camera pose, clutter, material, mass, friction, floor condition, and distractors.
- Failure and edge cases that would be unsafe or too costly to collect physically.
- Repeatable evaluation worlds where a policy can be compared against the same seeds, objects, and task definitions.
- Synthetic demonstrations for locomotion, manipulation, navigation, and whole-body behaviors.
- Software-in-the-loop tests for ROS 2 stacks, perception nodes, planners, and controllers before hardware time.
The weakness is just as important. Simulation is a model of reality, not reality itself. It can hide hard problems behind clean contact, simplified hands, ideal cameras, easy object meshes, or domain randomization that looks broad but misses the deployment distribution.
For humanoid robots, the risk is amplified because the body is the problem. A humanoid must manage balance, contact, foot placement, hand-object interaction, camera motion, self-occlusion, controller latency, and whole-body constraints. Synthetic data is strongest when the simulator preserves those relationships on one episode timeline: scene, instruction, robot state, action, contact, sensor output, and result.
That is why simulation environments should be compared as data systems, not only as physics engines.
The four layers of the simulator market
The simulator landscape is confusing because different tools occupy different layers.
The first layer is the physics engine. MuJoCo, Bullet, Newton, RaiSim, Chrono, SOFA, and Drake live mostly here. They answer questions about bodies, joints, contact, constraints, deformables, gradients, and dynamics.
The second layer is the robot-learning framework. Isaac Lab, ManiSkill, robosuite, Brax, MuJoCo XLA, MuJoCo Playground, and Habitat-Lab sit closer to training loops. They provide vectorized environments, tasks, rewards, wrappers, baselines, demonstrations, and evaluation pipelines.
The third layer is the robotics platform or digital twin. Isaac Sim, Gazebo, Webots, and CoppeliaSim are broader environments for robot import, sensors, middleware integration, scene authoring, testing, and visualization.
The fourth layer is synthetic-data generation and embodied AI scenes. Omniverse Replicator, Habitat-Sim, AI2-THOR, iGibson, SAPIEN, and related datasets focus heavily on scene variation, sensors, asset libraries, visual interaction, and labeled outputs.
Many products cross these boundaries. Isaac Sim uses PhysX and now also exposes Newton as a physics backend. ManiSkill is powered by SAPIEN. robosuite is powered by MuJoCo. CoppeliaSim can run multiple physics engines. Genesis World tries to combine physics, rendering, compiler, sensors, and robotics APIs in one Pythonic stack.
For buyers and sellers of training data, the layer matters. A physics engine may be excellent for contact-rich control research but weak for photorealistic sensor generation. A scene simulator may produce useful perception data but not trustworthy humanoid whole-body dynamics. A digital twin may integrate cleanly with ROS 2 but train slower than a GPU-vectorized learning framework.
There is also a fifth, less obvious layer: benchmark and task suites. RLBench, Meta-World, DeepMind Control Suite, Gymnasium Robotics, RoboCasa, and similar projects are not always new simulators. They package tasks, assets, demonstrations, rewards, and evaluation conventions on top of engines such as MuJoCo or CoppeliaSim. For buyers, that distinction matters because a "RoboCasa dataset" or an "RLBench demonstration" carries assumptions from both the underlying simulator and the task suite.
Licensing cuts across every layer. A simulator can be open source while the assets, plugins, render stack, task data, or redistribution terms are restricted. The article on open humanoid robot datasets covers the same trap in dataset form: commercial training rights are often decided per asset, per subset, or per license agreement, not by the headline project name.
Newton Physics: the new GPU-native engine to watch
Newton Physics is one of the most important new entries because of who is behind it and what it is trying to be. The project describes Newton as a GPU-accelerated, extensible, differentiable physics simulation engine built on NVIDIA Warp and integrating MuJoCo Warp. It is maintained by Disney Research, Google DeepMind, and NVIDIA, and the project has also been contributed into the Linux Foundation orbit through those organizations.
The architecture is modern and robotics-oriented. A model is built through a ModelBuilder, imported from URDF, MJCF, USD, or authored in Python, then finalized into a model with states, controls, contacts, solvers, sensors, and a viewer. The docs list multiple solver implementations, including XPBD, VBD, MuJoCo, Featherstone, SemiImplicit, Kamino, ImplicitMPM, and Style3D.
For robot training data, Newton is interesting for three reasons.
First, it is GPU-first. If a team wants to sample many worlds, many perturbations, or many synthetic trajectories, the cost of stepping the simulator becomes a data bottleneck. Newton is designed for that pressure.
Second, it is differentiable. Differentiability does not automatically make a robot dataset better, but it can matter for system identification, optimization, differentiable control, learning physical parameters, or generating trajectories that use gradients instead of pure black-box search.
Third, it sits inside the NVIDIA ecosystem without being only an Isaac Sim feature. Isaac Sim documentation now frames its simulator stack as "PhysX + Newton," and Isaac Lab documentation includes Newton Physics integration. That makes Newton a likely bridge between high-fidelity robotics scenes and large-scale learning loops.
The caveat is maturity. Newton looks like a serious platform, but newer simulation stacks need time before a broad community finds the sharp edges: model import gotchas, contact stability, sensor realism, GPU memory limits, documentation gaps, and reproducibility issues. For a commercial buyer, I would treat Newton-generated data as promising when the seller can document the exact version, solver settings, robot model, validation process, and any real-world calibration used.
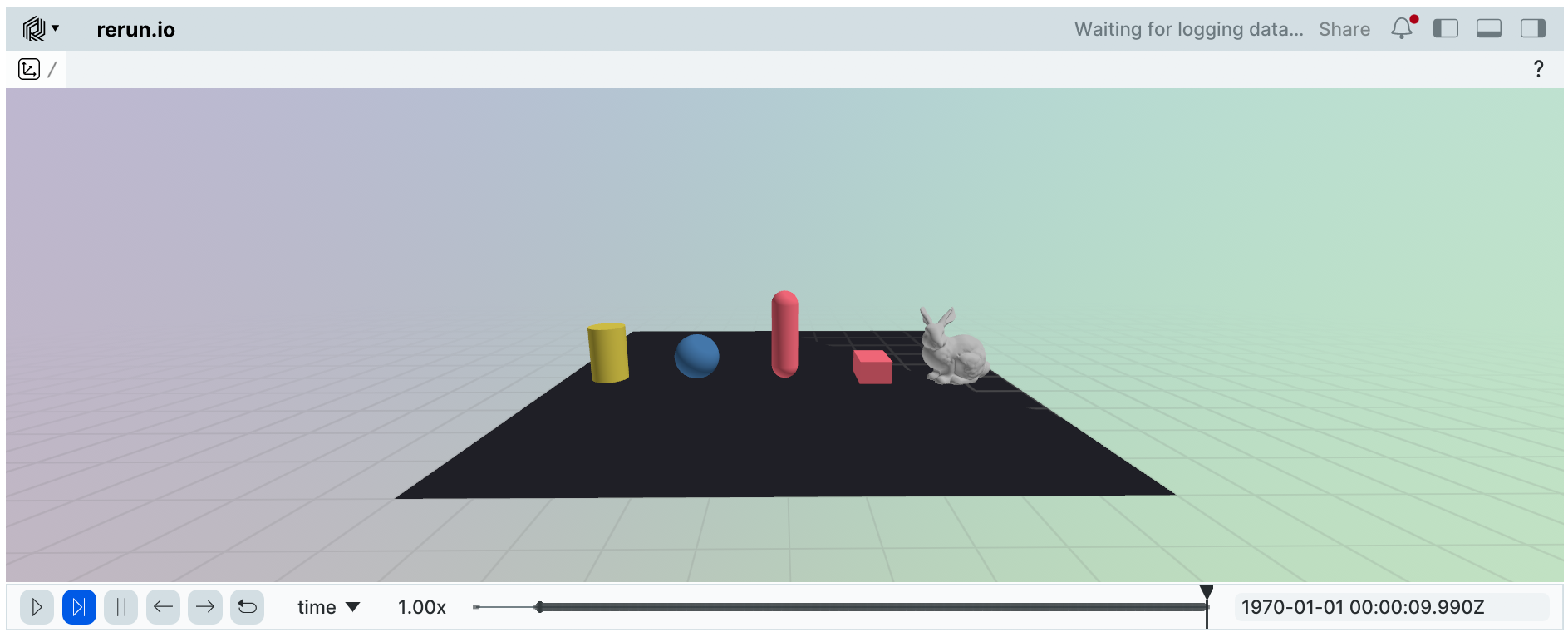
Newton visualization example from the project documentation. It shows why viewers and replay tooling matter when synthetic data needs to be inspected, not only generated. Source: Newton Physics visualization guide.
MuJoCo: the control and contact workhorse
MuJoCo, short for Multi-Joint dynamics with Contact, remains one of the most important engines for robot learning. It was acquired by Google DeepMind in 2021 and open sourced in 2022. The docs describe it as a general-purpose physics engine for robotics, biomechanics, graphics, animation, machine learning, and other work involving articulated structures interacting with the environment.
MuJoCo's value is its mechanics. It combines generalized coordinates with optimization-based contact dynamics, supports soft convex contacts, exposes inverse dynamics, uses a compact MJCF modeling format, loads URDF, and keeps a clean separation between model and data. Its runtime is designed to avoid memory allocation after initialization, which matters for predictable stepping and large sampling jobs.
For humanoid data, MuJoCo is strongest when the task is dynamics-heavy: locomotion, manipulation, control, contact analysis, system identification, policy training, and repeatable evaluation. Its visualizer is useful for debugging, but MuJoCo is not primarily a photorealistic synthetic-data renderer in the Isaac Sim or Omniverse sense.
The newer GPU story is also changing. The MuJoCo docs list GPU-accelerated backends through MuJoCo XLA and MuJoCo Warp. MJX provides a JAX API, runs on XLA-supported hardware, and includes a Warp implementation optimized for NVIDIA GPUs. The MJX docs are careful about tradeoffs: MJX-Warp is the more fully featured hardware-accelerated implementation, but unlike MJX-JAX it does not support automatic differentiation.
That distinction matters for data teams. If the goal is millions of training rollouts, MJX and Warp can be attractive. If the goal is gradient-based optimization, autodiff support becomes part of the selection. If the goal is photoreal images and labels, MuJoCo may be the physics layer under a different rendering or environment framework.
MuJoCo-generated datasets are easiest to trust when the seller provides the MJCF or URDF source, asset files, simulation options, control frequency, contact settings, randomization ranges, and a way to replay sample episodes.
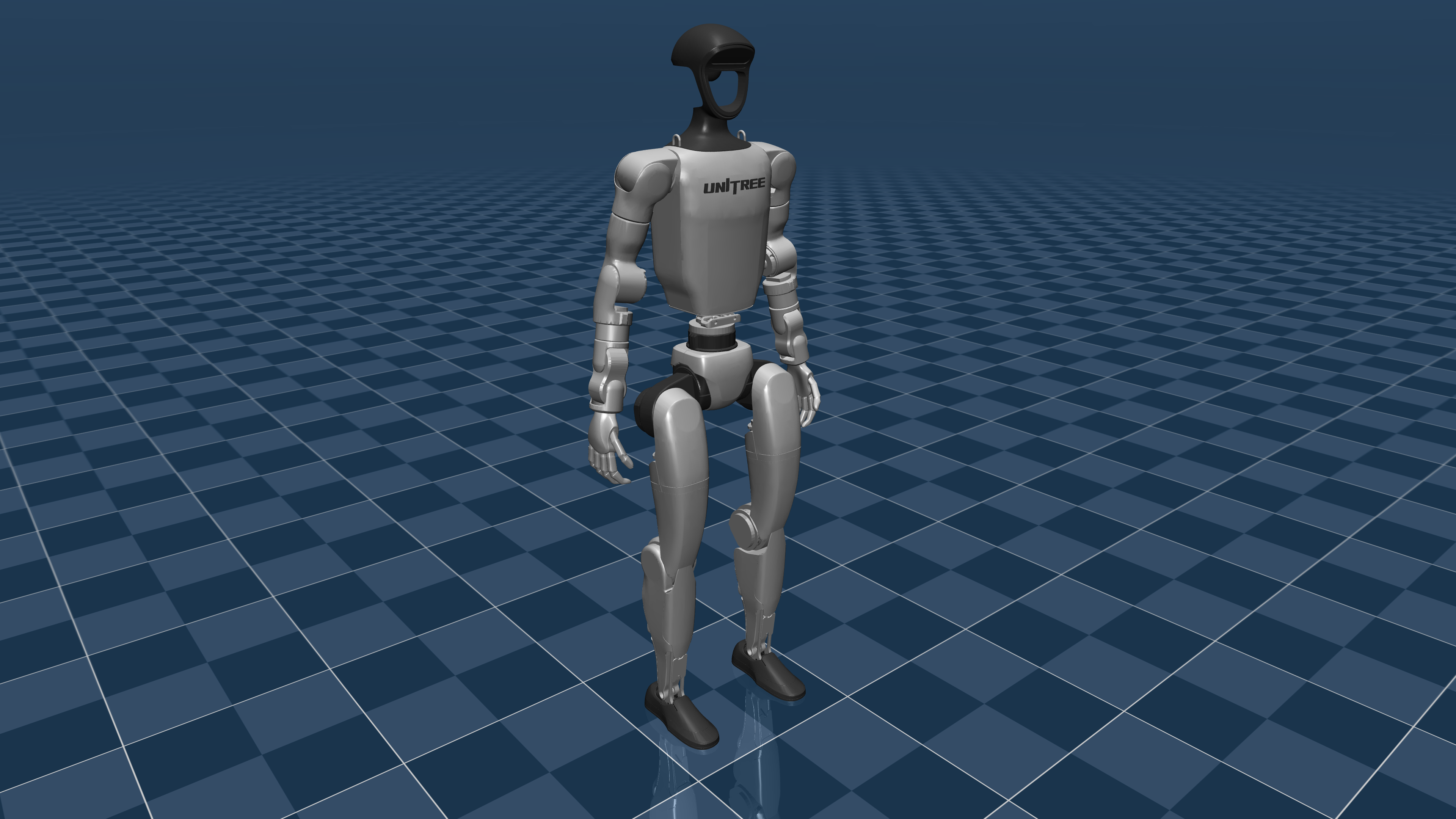
Unitree G1 preview from MuJoCo Menagerie. It shows why model provenance matters: the robot model, meshes, MJCF files, and licenses are part of the data product. Source: MuJoCo Model Gallery.
Genesis World: ambitious, fast, and still proving itself
Genesis World is newer and more ambitious than a narrow physics engine. Its docs describe a simulation platform for physical AI development that combines a unified multi-physics engine, a photorealistic renderer called Nyx, and a cross-platform compiler called Quadrants behind a Pythonic simulation interface.
The project positions itself across four layers: a simulation interface for assets, entities, controllers, sensors, parallel environments, and GUI; a unified multi-physics engine covering rigid bodies, FEM, MPM, particles, and coupling; rendering through Nyx, Luisa, and Pyrender; and a compiler targeting CUDA, AMD ROCm, Apple Metal, Vulkan, x86, and ARM64.
For robot training data, Genesis World is important because it aims to collapse several choices into one stack: physics, rendering, sensors, heterogeneous parallel environments, differentiability, and easy Python authoring. Its docs also list a wide sensor set, including tactile, IMU, lidar, depth camera, contact force, surface distance, and temperature grid sensors.
If those claims hold in real workflows, Genesis is especially relevant for teams that want to generate diverse synthetic datasets quickly without assembling a simulator from many pieces. It could be useful for manipulation, multi-material scenes, tactile-rich tasks, and fast robot-learning experiments.
The caveat is the same one that applies to every fast-moving platform: benchmark claims should not be treated as procurement facts until tested on the team's own tasks. Genesis' page says it can deliver 10 to 80 times faster simulation than existing GPU-accelerated robotic simulators. That is a project claim, not a universal guarantee. A buyer should ask what scene, solver, sensor stack, hardware, and fidelity settings were used for any dataset generated in Genesis.
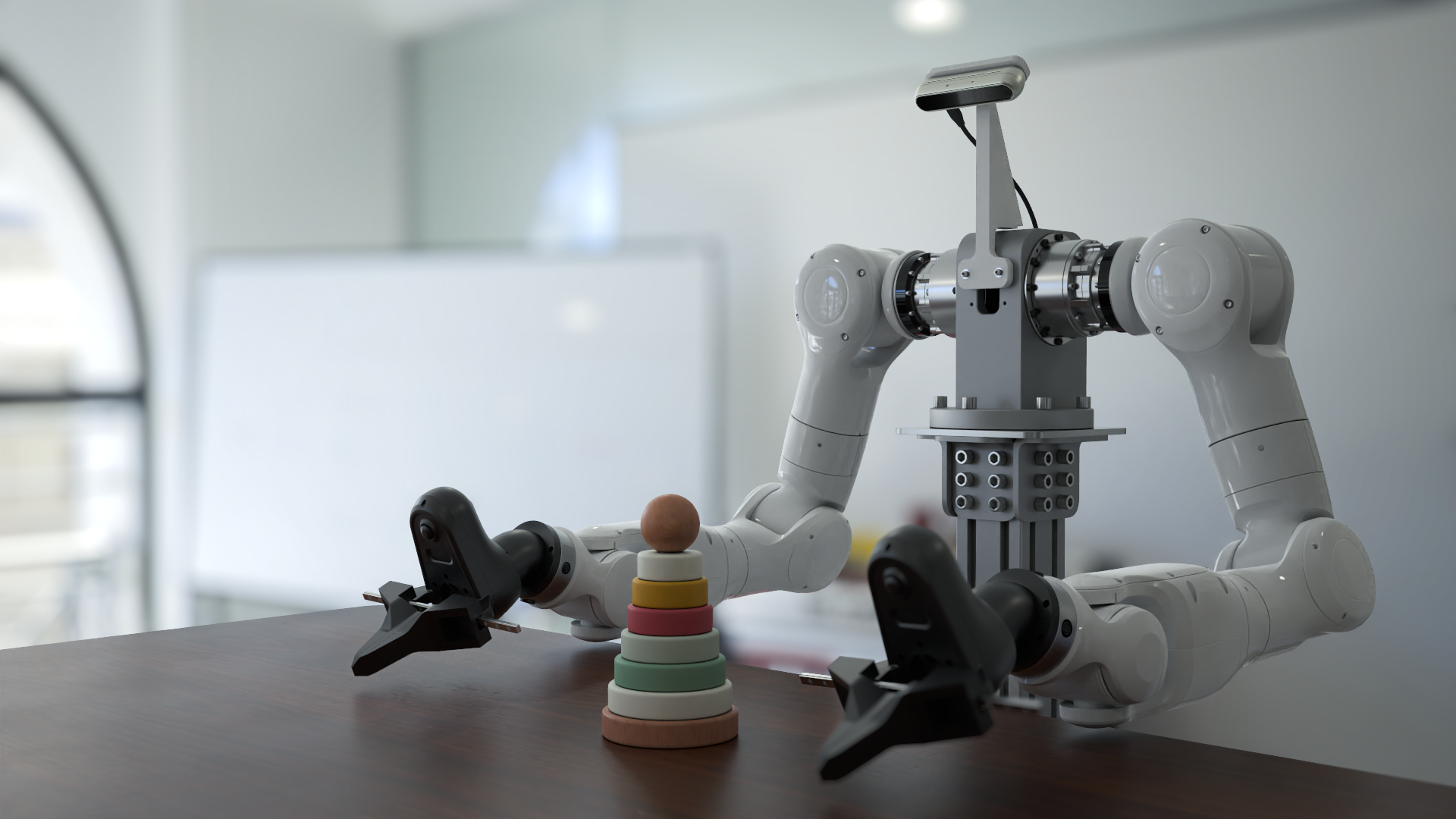
Genesis World teaser image, a useful example of how newer physical AI simulators blend robotics scenes, rendering, and multi-physics. Source: Genesis World repository.
Isaac Sim: the robotics digital twin and sensor data platform
NVIDIA Isaac Sim is the most complete simulator in this list when the job is not only physics stepping, but full robotics scene assembly. The docs frame Isaac Sim as a place to import robots and scenes from URDF, MJCF, Onshape CAD, or USD, simulate with PhysX or Newton, add RTX and physics-based sensors, generate synthetic data, prepare robots for Isaac Lab, and validate robot stacks with ROS 2.
That makes Isaac Sim valuable for three workflows.
First, synthetic data generation. Isaac Sim includes Replicator workflows for randomizing scenes, adding semantic labels, capturing sensor outputs, and writing annotated datasets. Omniverse Replicator is explicitly built for custom synthetic data pipelines with USD, PhysX, MDL materials, annotators, writers, randomizers, and domain-gap tooling.
Second, software-in-the-loop testing. Isaac Sim can connect to ROS 2 and external robot stacks, publish sensor output, receive commands, and validate a system before hardware. This is less glamorous than training, but often more commercially valuable because it catches integration failures.
Third, asset-centered robot workflows. USD gives Isaac Sim a strong scene graph for robots, sensors, warehouse scenes, CAD, reconstructed environments, materials, and labels. For sellers of synthetic datasets, that can make provenance easier to document: which assets, labels, randomizers, materials, cameras, and scene variants produced the data.
The tradeoff is weight. Isaac Sim is a large platform, not a tiny training loop. It can be overkill for a simple locomotion policy or fast controller experiment. It also requires care around asset quality, GPU requirements, versioning, randomization choices, and the domain gap between RTX-rendered scenes and deployment cameras.
For humanoid training data, Isaac Sim is strongest when sensor realism, scene variation, ROS 2 integration, USD asset provenance, and synthetic labels matter. If the core need is raw contact-rich control throughput, Isaac Lab, MuJoCo, Newton, Genesis, or another vectorized framework may be the better training layer.
Commercial teams should also separate source-code licensing from runtime and asset terms. Isaac Sim's public code may be open, but a dataset can still depend on NVIDIA platform terms, Omniverse Kit components, third-party USD assets, or redistribution restrictions. A buyer should ask whether the seller can transfer the generated data and any required assets under the buyer's intended commercial training use.
Isaac Lab: training environments on top of Isaac Sim
Isaac Lab is the learning framework that makes Isaac Sim more practical for policy work. The docs describe it as a unified modular framework for reinforcement learning, learning from demonstrations, and motion planning, built on Isaac Sim for photorealistic scenes and efficient simulation.
Its feature list reads like a robot-learning stack: modular environments, sensors, tasks, domain randomization, tiled rendering for vectorized rendering, cloud support, RL and imitation learning workflows, multi-GPU and multi-node training, teleoperation and imitation learning with Isaac Lab Mimic, and ready robot assets including Unitree H1 and Unitree G1 humanoids.
For humanoid data, Isaac Lab matters because it starts from the training workflow rather than only the simulator UI. It can generate rollouts, evaluate policies, randomize worlds, and connect synthetic data back to a broader NVIDIA stack that includes Isaac Sim, Replicator, GR00T, and robotics deployment tools.
The diligence question is whether a dataset came from Isaac Sim directly, Isaac Lab tasks, Isaac Lab Mimic demonstrations, or another NVIDIA workflow. The files may all look like "Isaac data," but the provenance and intended use are different.
Our earlier article on NVIDIA Isaac GR00T and humanoid robot training data covers why this matters for model inputs, action targets, and synthetic data provenance.
PyBullet and Bullet: accessible, useful, but not the newest high-fidelity path
Bullet Physics is a long-running real-time collision detection and multi-physics SDK used in games, visual effects, robotics, and machine learning. PyBullet made that engine especially accessible to robot-learning researchers through a Python interface and simple installation.
PyBullet's strength is practical accessibility. It has been used widely in reinforcement learning, locomotion, manipulation, assistive robotics, and sim-to-real research. It is easy to install, easy to script, and supported by years of examples.
For data generation, PyBullet can still be useful for fast prototyping, simple manipulation tasks, robot model debugging, RL baselines, and educational or research environments. It also connects historically to synthetic data work like Kubric, which used PyBullet with Blender for annotated scene generation.
The caveat is that the center of gravity has moved. For modern large-scale humanoid data, many teams now reach for MuJoCo, Isaac Lab, Genesis, Newton, ManiSkill, or custom GPU pipelines when they need high throughput, stronger rendering, differentiability, better contact modeling, or richer robotics environments.
That does not make PyBullet obsolete. It means PyBullet-generated commercial training data should be reviewed carefully for fidelity, contact settings, rendering assumptions, and whether the simulator was chosen for convenience rather than because it matched the target robot.
Gazebo: ROS-native simulation and integration testing
Gazebo is the default mental model for many ROS users. The current Gazebo docs organize the project around users who run gz sim, edit SDFormat files, use plugins, and interact through Gazebo Transport or ROS, plus developers who use libraries such as gz-math, sdformat, or gz-transport.
Gazebo's value is ecosystem fit. It is strong for robot description, SDF worlds, plugins, ROS integration, sensor simulation, headless runs, GUI inspection, and engineering validation. It is often the right choice when a team needs to test a robot stack that already lives in ROS 2, not when it needs the fastest possible GPU-vectorized RL training.
For data buyers, Gazebo-generated logs may be valuable as integration or evaluation data: ROS bags, sensor streams, navigation scenarios, robot-state logs, controller outputs, and repeatable worlds. They may be less valuable as high-fidelity photorealistic synthetic perception data unless the seller has built a strong rendering and domain-randomization layer around it.
Gazebo's long-term strength is not that it wins every benchmark. It is that many robots, students, labs, and ROS workflows already speak its language.
ManiSkill and SAPIEN: manipulation-focused data generation
SAPIEN is a realistic, physics-rich simulated environment built around articulated objects, robotics, rendering, and part-level interaction. It supports physical simulation for robots, rigid bodies, and articulated objects, with rendering modalities such as depth, normal maps, optical flow, active light, and ray tracing. It also connects to the PartNet-Mobility dataset, which matters for articulated objects like cabinets, doors, drawers, and appliances.
ManiSkill is the robot simulation and training framework powered by SAPIEN. The docs position it around manipulation skills, GPU-parallel visual data collection, GPU-parallel simulation, heterogeneous environments, real2sim evaluation, sim2real examples, and baselines for reinforcement learning, imitation learning, and vision-language-action models.
For robot training data, this stack is one of the most relevant outside NVIDIA. It is explicitly built around manipulation, visual data, task diversity, and learning pipelines. The docs mention humanoids, mobile manipulators, single-arm robots, tabletop tasks, dexterous manipulation, and high-throughput RGBD plus segmentation collection.
For humanoid teams, ManiSkill/SAPIEN is most attractive when the focus is manipulation, articulated-object interaction, synthetic visual data, and benchmarkable policy learning. Its relevance depends on how closely the task, robot embodiment, hand model, and sensors match the target platform.
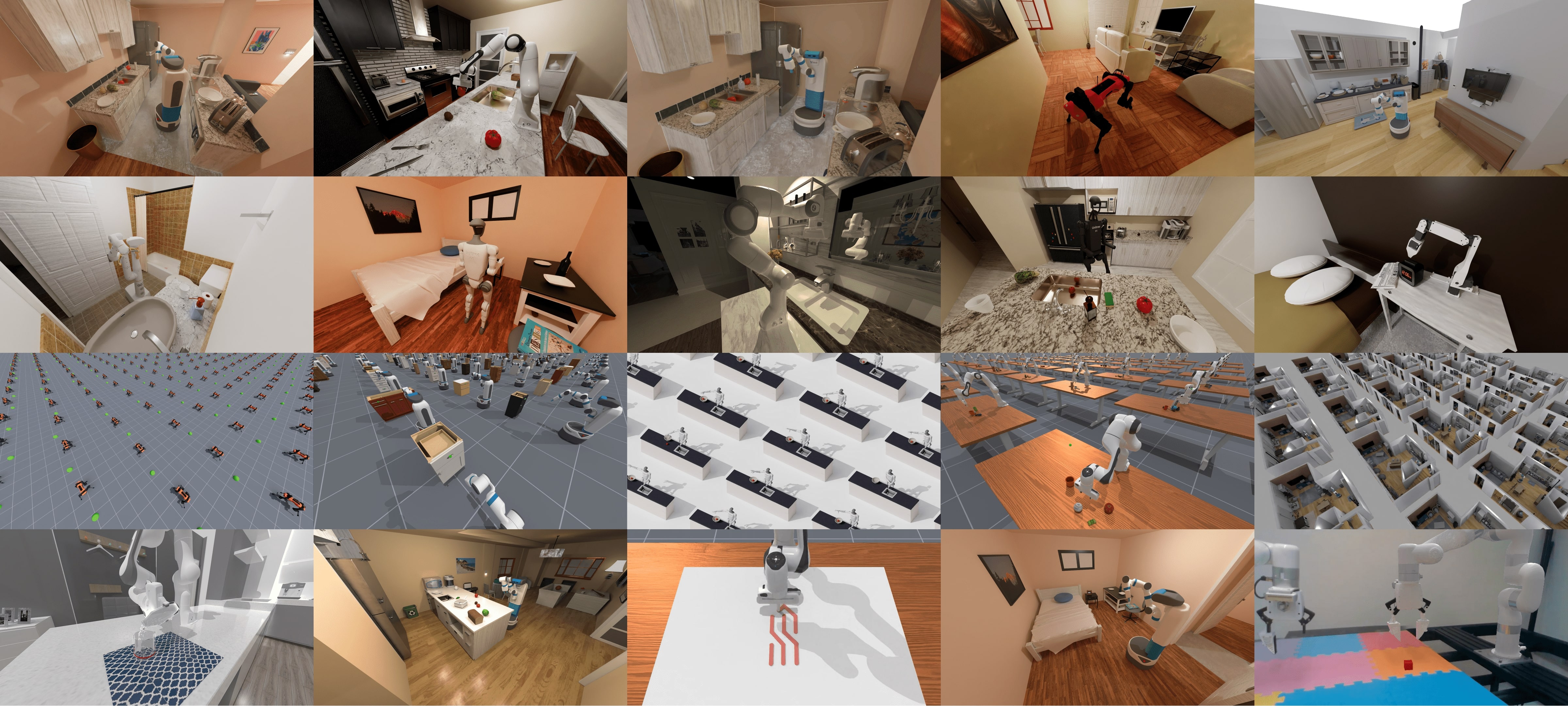
ManiSkill task and robot environment teaser. This is the kind of visual evidence buyers should pair with state, action, sensor, and asset documentation. Source: ManiSkill repository.
robosuite: MuJoCo environments for reproducible robot learning
robosuite is a MuJoCo-powered simulation framework and benchmark suite for robot learning. Its docs emphasize standardized tasks, modular APIs, custom robot composition, controllers, teleoperation devices, multi-modal sensors, human demonstrations, replay utilities, and photorealistic rendering integrations.
robosuite is valuable because it gives MuJoCo a higher-level robot-learning workflow. Instead of starting from a physics model, a team can work with environments, robots, arenas, controllers, sensors, demonstrations, and learning baselines. The current docs also mention support for diverse robot embodiments, including humanoids, and whole-body controllers.
For data generation, robosuite is a good fit for manipulation research, imitation learning prototypes, benchmark tasks, and demonstration collection. It is less likely to be the final answer for a full humanoid digital twin with production-grade sensors and ROS 2 integration, but it can be a strong environment for algorithmic work.
robosuite environment gallery. For buyers, this is a reminder to ask which task, robot, controller, sensors, and MuJoCo assets produced each demonstration. Source: robosuite repository.
Brax and accelerator-native RL environments
Brax is a Google project described as massively parallel rigid-body physics simulation on accelerator hardware. It is more narrowly aimed at fast RL-style simulation than at full robotics digital twins.
Brax matters because speed changes research behavior. If a team can generate enormous numbers of rollouts on accelerators, it can explore curricula, randomization, policy search, and controller variants quickly. That makes Brax relevant for locomotion and control experimentation.
The limitation is fidelity and workflow fit. Brax is not the environment I would choose for photoreal sensor data, ROS 2 software-in-the-loop tests, or detailed manipulation data with complex assets. It belongs in the high-throughput learning bucket. Google's current Brax repository also points users toward MJX and MuJoCo Warp for physics-heavy work, which is a useful signal about where the ecosystem is moving.
Webots: robust open-source desktop robotics simulation
Webots is an open-source, multi-platform desktop application for modeling, programming, and simulating robots. Cyberbotics has maintained it since 1998. The project combines a Qt GUI, an ODE-based physics engine, OpenGL rendering, built-in assets, sensors, actuators, robots, and APIs for C, C++, Python, Java, MATLAB, and ROS.
Webots is not the flashiest tool in the list, but it is durable. It is useful for education, industrial prototyping, robot contests, mobile robots, legged robots, indoor service robots, autonomous vehicles, drones, and ROS-connected simulations.
For training data, Webots is best seen as an engineering simulator and prototyping environment. It can produce structured robot logs and simulated sensor outputs, but buyers should verify physics fidelity, rendering realism, robot model quality, and whether the exported data lines up with the target training stack.
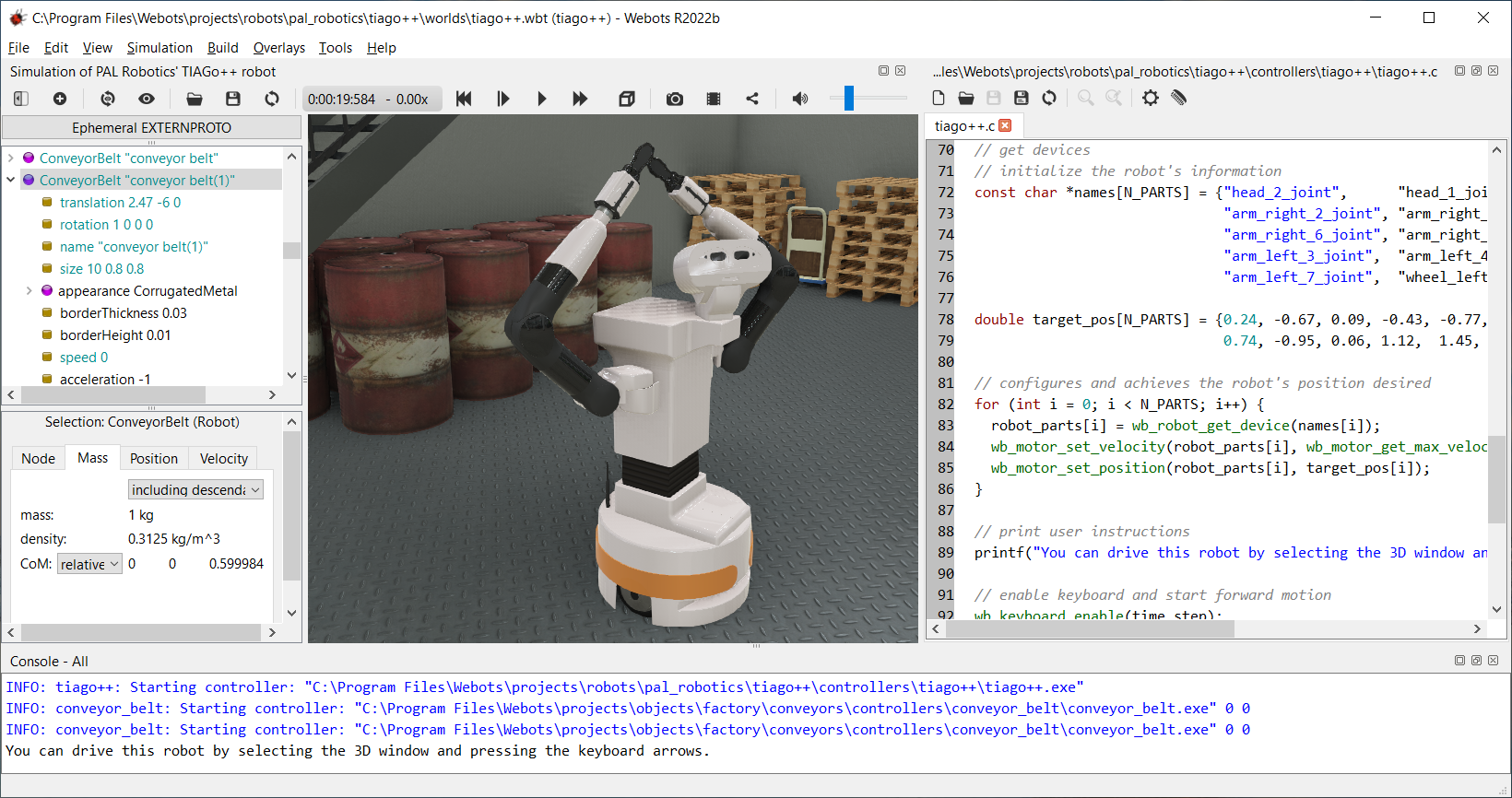
Webots main-window screenshot. Its value is often in durable engineering workflows, robot assets, sensors, and simulation export paths rather than fashionable benchmark speed. Source: Webots repository.
CoppeliaSim: flexible prototyping, kinematics, and multi-engine simulation
CoppeliaSim is a broad robotics simulator for prototyping, kinematic design, digital twins, and automation. Its docs highlight a distributed control architecture where objects can be controlled by embedded Python or Lua scripts, plugins, remote API clients, or custom solutions.
Its unusual strength is flexibility. CoppeliaSim supports multiple dynamic engines, including MuJoCo, Bullet, ODE, Newton, and Vortex; forward and inverse kinematics; exact proximity sensors; vision sensors; path planning through OMPL; APIs across several languages; ROS interfaces; collision and distance calculations; plugins; and a browser-based viewer.
For data work, CoppeliaSim can be useful when the task involves kinematics, multi-robot scenes, factory automation, prototyping, or digital twin experiments. Its multi-engine support is helpful, but it also means "CoppeliaSim data" is not specific enough. A seller should say which physics engine was used, what model settings were active, and how sensors were simulated.
Drake: model-based design, control, and verification
Drake is not primarily a dataset factory. It is a C++ and Python toolbox for model-based design and verification, supported by the Toyota Research Institute. Its docs emphasize dynamics, control systems, optimization, multibody kinematics and dynamics, friction, contact, analytical gradients, sparsity, polynomial structure, uncertainty quantification, planning, and analysis.
That makes Drake important for serious robotics teams even if it is not the first tool a data seller mentions. Drake is useful when the question is "can this controller, planner, contact model, or dynamic system be analyzed and verified?" rather than "can we render a million labeled frames?"
For humanoid data, Drake can help validate trajectories, reason about dynamics, design controllers, and analyze contact-heavy tasks. It is less suited to mass-market synthetic perception data unless paired with other tools.
SOFA and Chrono: soft bodies, deformables, vehicles, and complex mechanics
SOFA is an open-source framework for interactive mechanical simulation with emphasis on biomechanics and robotics. Its docs focus on continuum mechanics, FEM, rigid and soft bodies, scene graphs, mappings between mechanical/collision/rendering representations, haptics, plugins, Python scripting, GPU and multithreading support, and an LGPL open core.
SOFA matters when the robot touches soft things: tissue, deformable objects, cables, cloth, haptics, medical devices, or compliant mechanisms. For humanoid household manipulation, this category becomes relevant around laundry, bags, food, deformable packaging, and human-contact tasks.
Project Chrono is an open-source physics-based modeling and simulation infrastructure in C++ with PyChrono bindings. Its strengths include multibody dynamics, finite elements, vehicle dynamics, deformable terrain, granular flows, fluid-solid interaction, collision detection, and large-scale simulation. The project lists robotics, wheeled and tracked vehicles, off-road mobility, terramechanics, autonomous vehicles, and mechatronics among its applications.
Chrono is most relevant when mobility, terrain, vehicles, deformable ground, granular materials, or mechanical systems dominate the problem. It is not the standard choice for humanoid manipulation data, but it can be valuable for robots operating on rough terrain, mobile bases, wheels, tracks, or outdoor environments.
RaiSim: fast multibody simulation for robotics and AI
RaiSim is a cross-platform multibody physics engine for robotics and AI. Its docs list rigid bodies, articulated systems, deformable bodies, granular particles, RGB/depth rendering through rayrai, deterministic CPU ray sensors for headless fallback, server streaming, and a visualizer.
RaiSim has been popular in legged locomotion research because it is fast and focused. For humanoid teams, it is worth considering when locomotion, articulated dynamics, and efficient simulation matter more than photoreal scene generation.
As with other engine-level tools, the buyer diligence is less about the brand and more about replayability: robot model, contact parameters, terrain model, control interface, sensor model, and real-world validation.
Habitat, AI2-THOR, and iGibson: embodied AI scenes, not full robot dynamics
Habitat-Sim is a high-performance 3D simulator for configurable agents, multiple sensors, and generic 3D dataset handling, with built-in support for datasets such as Matterport3D, Gibson, and Replica. The docs emphasize fast rendering, configurable agents, and sensor-rich navigation research.
AI2-THOR is a Unity-based embodied AI environment with iTHOR, RoboTHOR, and ManipulaTHOR. Its site lists rooms, objects, object state changes, physics-based interaction, humanoids and drones, multiple agents, and physical counterparts for RoboTHOR apartments.
iGibson, from Stanford, belongs in the same conversation as an interactive scene simulator for embodied AI and household environments. Its documentation frames it around realistic indoor scenes, interactive objects, navigation, mobile manipulation, RGB, depth, segmentation, point clouds, optical flow, lidar, and Bullet physics.
These simulators are useful for perception, navigation, language-conditioned tasks, household scenes, and embodied AI benchmarks. They are weaker choices when the central problem is full humanoid dynamics, contact-rich dexterous manipulation, actuator-level control, or real robot data alignment.
For data buyers, that means Habitat or AI2-THOR data can be valuable for scene understanding, object context, navigation, and task semantics. It should not be mistaken for whole-body humanoid policy data unless a robotics layer has been added and documented.

iGibson interactive scene example. These environments are strong for household context, sensors, and interaction, but they still need a documented robotics layer before they become humanoid policy data. Source: iGibson scene documentation.
Omniverse Replicator: synthetic labels and domain randomization
Omniverse Replicator is not a simulator in the same way MuJoCo or Gazebo is. It is a synthetic data generation framework for building pipelines and services. It integrates with USD, PhysX, and MDL; provides annotators, writers, semantic labels, randomizers, and visualization; and is exposed through Isaac Sim.
Replicator's value is label quality and dataset production. It can generate bounding boxes, segmentation, normals, depth, pose outputs, and custom annotations from randomized scenes. The docs are also unusually direct about the domain gap: synthetic data must address both the appearance gap and the content gap, and real data remains necessary to validate model performance.
For humanoid robot training data, Replicator is strongest for perception and sensor datasets: object detection, segmentation, pose estimation, synthetic camera views, rare visual cases, and scene variation. It is less complete as a source of physical skill demonstrations unless paired with a simulator and task pipeline that produces meaningful robot actions and outcomes.
Benchmark suites and task libraries
Some of the most useful names in simulation are not standalone engines. They are task suites that make experiments reproducible.
RLBench is built around CoppeliaSim and PyRep, with a large set of manipulation tasks, demonstrations, and multi-modal observations. It is useful for imitation learning and vision-based manipulation research, but its license is restrictive for commercial use, so it should not be casually folded into a training corpus.
Meta-World is a MuJoCo-based benchmark for multi-task and meta-RL manipulation. DeepMind Control Suite is another MuJoCo-based benchmark family, focused on continuous control tasks and MJCF composition. Gymnasium Robotics collects MuJoCo robotics environments such as Fetch, Shadow Hand, and related manipulation tasks behind the Gymnasium API.
RoboCasa is especially relevant for household manipulation because it builds kitchen tasks and assets on MuJoCo, with large environment and object variation. It is closer to the kind of structured synthetic household data a manipulation team might actually inspect.
These projects are valuable because they encode tasks, not only physics. The buyer caution is that benchmark success is not the same as deployment readiness. A model that performs well on a standardized suite may still fail when the target robot has different hands, cameras, latency, objects, or household layouts.
What to ask before buying simulation-generated data
Simulation-generated datasets need the same diligence as real robot datasets, plus a simulation-specific layer.
Ask for the simulator provenance:
- Simulator name, version, commit, license, and any plugins or extensions.
- Physics backend, solver settings, timestep, substeps, contact model, friction ranges, restitution, masses, inertias, and randomization distributions.
- Robot model source: URDF, MJCF, USD, SDF, CAD, mesh assets, joint limits, actuator model, controller, and calibration.
- Sensor model: camera intrinsics, extrinsics, rolling shutter assumptions, depth noise, lidar model, IMU model, tactile model, latency, frame rate, and dropped-frame behavior.
- Asset provenance: source of objects, rooms, textures, meshes, licenses, scale, mass assumptions, material settings, and whether assets can be used for commercial model training.
- Dataset and benchmark terms: whether demonstrations, generated labels, task definitions, and bundled assets can be used for commercial training, redistribution, or derivative datasets.
- Episode schema: observation, state, action, reward, labels, contact events, interventions, failures, seeds, randomization config, and replay instructions.
- Validation: real-world comparison, ablations, sim-to-real tests, human review, failure filtering, and known limitations.
The most trustworthy sellers make simulation reproducible. They can show a sample episode, the config that generated it, the robot model, the random seed, and the reason they believe it transfers.
How to choose by use case
For contact-rich humanoid control, start with MuJoCo, MuJoCo MJX/Warp, Newton, Isaac Lab, Genesis World, RaiSim, or Drake depending on whether the priority is speed, differentiability, analysis, or NVIDIA ecosystem fit.
For photorealistic synthetic perception data, start with Isaac Sim and Replicator, then consider Genesis World, SAPIEN/ManiSkill, Habitat, AI2-THOR, or Blender-based pipelines depending on how much robotics physics is needed.
For manipulation tasks and articulated household objects, start with ManiSkill/SAPIEN, MuJoCo/robosuite, Isaac Lab, Isaac Sim, or CoppeliaSim. Pay close attention to hand models, contact, object articulation, and sensor outputs.
For ROS 2 integration and robot-stack validation, start with Gazebo or Isaac Sim. Webots and CoppeliaSim can also be strong depending on the team's existing models and plugins.
For locomotion and legged robots, start with Isaac Lab, MuJoCo/MJX, Newton, RaiSim, Brax, Genesis World, or Drake. For humanoids, verify that the environment supports the target body, feet, terrain, balance constraints, and controller interface.
For soft bodies, deformables, tissue, cloth, cables, granular materials, or terrain, look beyond the common RL simulators. SOFA and Chrono may be more relevant than Isaac Sim or MuJoCo for parts of the problem.
For navigation and embodied AI in household scenes, Habitat, AI2-THOR, iGibson, Gazebo, Isaac Sim, and Webots can all play roles. The right answer depends on whether the model needs visual semantics, realistic sensors, physics interaction, ROS integration, or policy training.
The market implication for Humanoids Data
Simulation is becoming a data source, but it is also becoming a provenance problem.
Buyers should not ask only for "synthetic data." They should ask what the simulator knew, what it guessed, and what was validated. A synthetic episode generated from known assets, calibrated robot models, documented randomizers, aligned state/action logs, and real-world checks is a different product from a rendered video clip.
Sellers should package simulation data like a technical asset, not a media asset. The dataset card should include the simulator stack, version, robot model, scene assets, sensor model, action space, randomization ranges, labels, licensing, and validation results. If the data is mixed with real robot logs, explain the mixture clearly.
The best simulation environments will not replace real-world collection. They will make real-world collection more strategic. A team can use simulation to explore variation, generate labels, test policies, find failures, and pretrain models, then spend physical robot time on grounding, calibration, edge cases, and final validation.
That is the practical standard: simulation data should reduce the cost of learning from the real world, not pretend the real world is optional.
Simulation environment comparison table
| Environment | Type | Best fit for robot training data | Strengths | Watch-outs |
|---|---|---|---|---|
| Newton Physics | GPU physics engine | Large-scale robotics simulation, differentiable workflows, future NVIDIA, DeepMind, and Disney stack integration. | GPU acceleration, differentiability, multiple solvers, URDF/MJCF/USD import, modern Python API. | Newer ecosystem; require version, solver settings, validation, and replay evidence. |
| MuJoCo | Physics engine | Contact-rich control, locomotion, manipulation, inverse dynamics, and policy training. | Strong articulated dynamics, MJCF, URDF import, efficient runtime, mature research usage. | Not primarily photorealistic; synthetic sensor data may need another renderer. |
| MuJoCo XLA / MJX | Accelerator backend | Large parallel rollout generation on GPUs, TPUs, Apple Silicon, and JAX/XLA stacks. | JAX API, device execution, MJX-JAX autodiff, MJX-Warp performance on NVIDIA GPUs. | MJX-Warp does not support autodiff; contact buffer limits and graph modes need tuning. |
| Genesis World | Unified physical AI platform | Fast synthetic robot data, multi-physics, sensors, differentiable simulation, Python-first research. | Rigid, FEM, MPM, particle physics, Nyx renderer, Quadrants compiler, tactile and other sensors. | Very ambitious and newer; benchmark claims need task-specific verification. |
| NVIDIA Isaac Sim | Robotics simulator and digital twin | Synthetic sensor data, USD scene workflows, ROS 2 software-in-the-loop testing, high-fidelity robotics scenes. | URDF/MJCF/CAD/USD import, PhysX/Newton, RTX sensors, Replicator, ROS 2 integration. | Heavy stack; source, runtime, assets, and redistribution terms need separate review. |
| Isaac Lab | Robot-learning framework | RL, imitation learning, domain randomization, humanoid and legged policy training. | Built on Isaac Sim, vectorized rendering, Unitree H1/G1 assets, teleop and imitation workflows. | Distinguish Isaac Lab task data from raw Isaac Sim synthetic data. |
| Omniverse Replicator | Synthetic data pipeline | Labeled perception data, domain randomization, segmentation, depth, pose, and bounding boxes. | USD, PhysX, MDL integration, randomizers, annotators, writers, Isaac Sim exposure. | Strong for labels and images, not a full physical skill dataset by itself. |
| PyBullet / Bullet | Physics engine and Python API | Fast prototyping, RL baselines, simple manipulation and locomotion experiments. | Easy install, broad examples, robotics and ML history, accessible Python interface. | Less central for new high-throughput or high-fidelity humanoid pipelines. |
| Gazebo | ROS-oriented robotics simulator | ROS 2 integration, SDF worlds, robot-stack validation, sensor simulation. | gz sim, SDF, Gazebo Transport, ROS workflows, headless and GUI modes. | Not the fastest RL training path; rendering and physics fidelity depend on setup. |
| ManiSkill | Robot simulation and training framework | Manipulation, articulated objects, visual data collection, RL, IL, and VLA baselines. | GPU-parallel RGBD and segmentation, heterogeneous scenes, SAPIEN backend, sim-to-real examples. | Embodiment and task fit must be checked for humanoid-specific data. |
| SAPIEN | Physics-rich robotics and articulated-object simulator | Part-level interaction, articulated objects, rendering modalities, manipulation tasks. | Rigid and articulated simulation, depth, normals, optical flow, ray tracing, PartNet-Mobility. | Often most useful through ManiSkill; asset and license provenance still matter. |
| robosuite | MuJoCo robot-learning framework | Manipulation benchmarks, demonstrations, controllers, reproducible research. | Standard tasks, modular robots and controllers, teleoperation devices, multi-modal sensors. | Better for research environments than production digital twins. |
| Brax | Accelerator-native physics and RL engine | Very high-throughput RL rollouts and control experiments. | Massively parallel rigid-body simulation on accelerator hardware. | Not a photoreal or ROS integration platform; physics-heavy users may prefer MJX or MuJoCo Warp. |
| Webots | Open-source desktop robot simulator | Education, prototyping, ROS-connected robots, mobile and legged simulations. | Mature GUI, broad robot and sensor assets, multiple languages, ROS support. | Less specialized for modern large-scale humanoid data generation. |
| CoppeliaSim | Flexible robotics simulator | Prototyping, kinematics, digital twins, automation, multi-robot scenes. | Multiple physics engines, IK/FK, sensors, OMPL planning, many APIs, ROS interfaces. | "CoppeliaSim data" must specify physics engine and sensor settings. |
| Drake | Model-based design and verification toolbox | Dynamics analysis, optimization, control, planning, verification. | Exposes structure, gradients, sparsity, multibody dynamics, mathematical programs. | Not primarily a large-scale synthetic image or demonstration factory. |
| SOFA | Soft-body and mechanical simulation framework | Deformable objects, biomechanics, haptics, compliant interaction, medical robotics. | FEM, soft and rigid dynamics, scene graph, mappings, plugins, Python scripting. | More specialized; commercial data use may need plugin and license review. |
| Project Chrono | Multibody, vehicle, FEA, terrain physics | Vehicles, tracked robots, terrain, granular materials, fluid-solid interaction. | BSD-3, C++ and PyChrono, vehicles, deformable terrain, large-scale mechanics. | Not the default for humanoid manipulation unless terrain or mechanics dominate. |
| RaiSim | Multibody physics engine | Legged locomotion, articulated dynamics, efficient robotics simulation. | Fast multibody focus, articulated systems, sensors, visualizer, headless ray sensors. | Less complete as a photoreal scene and dataset-labeling platform. |
| Habitat-Sim | Embodied AI 3D simulator | Navigation, scene understanding, visual sensors, household and indoor datasets. | Fast rendering, configurable agents, multiple sensors, Matterport3D, Gibson, Replica support. | Not a full humanoid dynamics or dexterous manipulation simulator. |
| AI2-THOR | Embodied AI environment | Household interaction, object states, visual navigation, semantic tasks. | Unity scenes, iTHOR, RoboTHOR, ManipulaTHOR, object states, multiple agents. | Useful for semantics and interaction, weaker for full robot embodiment fidelity. |
| iGibson | Embodied AI and household interaction simulator | Indoor navigation, mobile manipulation, interactive household scenes. | RGB, depth, segmentation, point clouds, optical flow, lidar, Bullet physics. | Software may be permissive while scene and dataset assets carry separate terms. |
| RLBench | CoppeliaSim/PyRep manipulation benchmark | Imitation learning, manipulation tasks, demonstration replay. | Large task library, multi-modal observations, waypoint demonstrations. | License restrictions make it risky for commercial training without review. |
| Meta-World | MuJoCo manipulation benchmark | Multi-task and meta-RL manipulation research. | Standardized manipulation tasks, Gym-style usage, broad baseline history. | Benchmark tasks are not a substitute for target embodiment and sensor validation. |
| DeepMind Control Suite | MuJoCo continuous-control suite | Control baselines, MJCF composition, algorithm comparison. | Mature MuJoCo task family, useful for continuous-control research. | Mostly a benchmark layer, not a humanoid data marketplace product. |
| Gymnasium Robotics | MuJoCo robotics environments | Fetch, Shadow Hand, Adroit-style tasks under common RL APIs. | Familiar Gymnasium interface, robotics task coverage, maintained ecosystem. | Environment success does not guarantee transfer to a commercial humanoid body. |
| RoboCasa | MuJoCo household manipulation framework | Kitchen manipulation, task variation, household object interaction. | Large kitchen, task, and object variation, useful household manipulation framing. | Check asset and data terms separately from code; still sim-to-real limited. |
| CARLA | Autonomous driving simulator | Outdoor driving, traffic, camera and lidar perception, AV policy evaluation. | Strong driving scenes and sensor simulation. | Not a humanoid simulator; useful only for adjacent mobility and perception work. |
| Unity Robotics / custom Unity sims | Game-engine simulation stack | Custom interactive scenes, synthetic vision, teleoperation prototypes. | Flexible rendering and interaction, large Unity ecosystem. | Physics, robot models, and data schemas are highly project-specific. |
| Blender/Kubric-style pipelines | Synthetic rendering pipeline | Labeled object-centric visual data, domain variation, perception datasets. | Photoreal rendering, segmentation, depth, flow pipelines, asset control. | Usually not enough for robot state, action, and contact data without a robotics simulator. |