Humanoid robot data · 15 June 2026
Open-Source Humanoid Robot Hands: What to Compare Before Collecting Manipulation Data
Open-source humanoid hands are becoming data collection equipment. The appeal is obvious: a research team can build, repair, instrument, and modify a dexterous hand without waiting for a proprietary supplier or spending six figures on hardware.
The harder question is not which hand looks most human. It is which hand produces useful manipulation data. A cheap hand with clean software, known joint limits, simulator files, and repeatable calibration may be more valuable for robot learning than a more complex hand with poor documentation. A compliant hand may capture contact-rich tasks better. A tactile hand may be the right choice if the policy needs to learn slip, force, and contact timing.
This guide starts with two recent examples, Aero Hand Open and CRAFT Hand, then follows CRAFT's own comparison trail to RUKA, ORCA, and LEAP. It also covers other open projects worth knowing: BiDexHand, Pollen Robotics' Amazing Hand, Yale OpenHand, DexHand, GaiaHand, and OpenBionics.
For the broader hardware stack around these choices, read the guide to humanoid robot data collection equipment. For gripper-style capture devices rather than full humanoid hands, the guide to data collection grippers for robot training data is the closer fit.
What "open-source hand" should mean in practice
For robot learning, "open-source" is useful only if it reaches the parts of the stack that affect data.
At minimum, a buyer should look for:
- Mechanical files: STEP, STL, Onshape, SolidWorks, or other editable CAD.
- A bill of materials with part numbers, quantities, and realistic sourcing notes.
- Assembly and repair documentation, including tendon routing and calibration.
- Firmware, SDKs, ROS or ROS 2 packages, and example scripts.
- URDF, MJCF, MuJoCo, Isaac, or other simulator assets.
- Known joint schema, control frequency, limits, units, and coordinate frames.
- A clear license for software, hardware design files, documentation, and commercial use.
That last point is easy to miss. Open files do not always mean commercial reuse. Several strong hand projects release software permissively while design files carry non-commercial or share-alike terms. That may be fine for research, but it matters if you plan to manufacture hands, sell kits, or train a commercial policy on data collected with modified hardware. The same license discipline applies to open datasets, as covered in the guide to open humanoid robot datasets.
Aero Hand Open: the low-cost fleet-scaling option
Aero Hand Open is the cleanest example of the current low-cost wave. TetherIA describes it as a tendon-driven, open-source, anthropomorphic robotic hand for dexterous manipulation research. The project page lists a cost of $314, weight under 400 g, 7 motors, 16 joints, a dexterous thumb with 3 active DoF, backdrivability, position and torque control, and inline tendon force sensing.
The Aero Hand Open GitHub repository fills in the build story: 5 fingers, 7 DoF, 389 g weight, a complete BOM, CAD files, PCB design files, Python SDK, ROS 2 Humble support, MuJoCo simulation, and reinforcement learning tools. That combination matters for data teams because the hand is not only a printable object. It has enough software and simulation surface to become part of a repeatable collection rig.
Aero Hand Open overview image. Source: TetherIA Aero Hand Open repository.
Aero Hand Open sequence-control demo. Source: TetherIA Aero Hand Open repository.
The best use case is low-cost replication. If a lab wants several hands for teleoperation experiments, student projects, manipulation-policy iteration, or early dataset collection, Aero's price and documentation make it attractive. The main caution is licensing and duty cycle. The repository says the software is Apache 2.0, while the design files are CC BY-NC-SA 4.0 and require a commercial manufacturing license for commercial printing or cloning. The project also describes the hand as a research prototype and warns that 3D-printed parts, tendon tension, and overload risk need user care.
For dataset buyers, the useful question is: was the data collected on a purchased commercial unit, a self-built non-commercial replica, or a modified derivative? The answer affects provenance, repeatability, and possibly rights.
CRAFT Hand: compliance for contact-rich manipulation
CRAFT Hand is a different kind of open hand candidate. The RSS 2026 project frames the hand around hybrid hard-soft compliance: soft material at joints, rigid links where load is carried, and rolling-contact joint surfaces for repeatable flexion paths. The page says 15 motors mounted off the fingers drive the hand through tendons. It also claims the hand covers 33/33 grasps in the Feix taxonomy and costs under $600.
That makes CRAFT especially interesting for contact-rich teleoperation. A rigid hand can be accurate but brittle around fragile objects, low-friction surfaces, impacts, and awkward insertion tasks. CRAFT's pitch is that contact is uneven across the hand, so compliance should be placed where impacts concentrate rather than spread uniformly across the whole structure.
CRAFT Hand teleoperation and grasping video. Source: CRAFT Hand project page.
CRAFT also gives a useful map of adjacent projects. Its test section compares against RUKA, ORCA, LEAP V2, and LEAP Lite. Those names are a good starting point because they represent the live research conversation: tendon routing, soft-rigid structures, adduction and abduction, DIP motion, repeatability, assembly time, and whether the hand can reach into constrained spaces.
The caveat is release status. The CRAFT page says the full design "will be released open-source" with vision-based teleoperation and simulation integration, and it links to a paper, API, MJCF model, assembly, BOM, Bambu 3MF files, and Onshape resources. Before treating CRAFT as build-ready, a buyer should verify the current state of the CAD, BOM, license, and control stack from the repositories, not only the project page.
LEAP Hand: the robot-learning baseline
LEAP Hand is one of the reference platforms for low-cost dexterous robot learning. The RSS 2023 project describes a 16-DoF anthropomorphic hand that can be assembled from readily available parts for under $2,000, with released URDF, 3D CAD files, tuned simulation environments, and APIs. The project has been used across visual teleoperation, sim-to-real, passive video learning, and behavior cloning work.
The newer LEAP Hand v2 pushes the price down sharply. Its project page describes a $200, 8-powered-DoF hand with 16 total DoF, hybrid rigid-soft construction, underactuated curling fingers, a dexterous MCP side joint, 3D-printed parts, assembly in under two hours, and open-source tools for MANO and Vision Pro retargeting, Manus glove teleoperation, URDF simulation, and multiple simulation engines.
LEAP is attractive when the software ecosystem matters as much as the hand. If a team wants a known robot-learning reference, LEAP's public experiments and community use reduce integration uncertainty. The tradeoff is embodiment fit. LEAP's kinematics are optimized for dexterity and learning, not simply for matching a human hand bone-for-bone. That can be a strength for policy learning and a complication for retargeting human-hand data.
RUKA and RUKA-v2: tendon control plus humanlike mobility
RUKA comes from a learning-first design philosophy. The project describes a tendon-driven humanoid hand with 5 fingers and 15 underactuated degrees of freedom, built from 3D-printed and off-the-shelf parts for under $1,300. It includes open-source design files, assembly instructions, code, data, MANUS glove teleoperation, Oculus/OpenTeach teleoperation, MuJoCo XML files, and learned controllers that map human hand observations to tendon commands.
That controller story is important. Tendon hands are cheap and compact, but tendons add hysteresis, slack, friction, and build-to-build variation. RUKA treats that as a learning problem rather than trying to remove it mechanically.
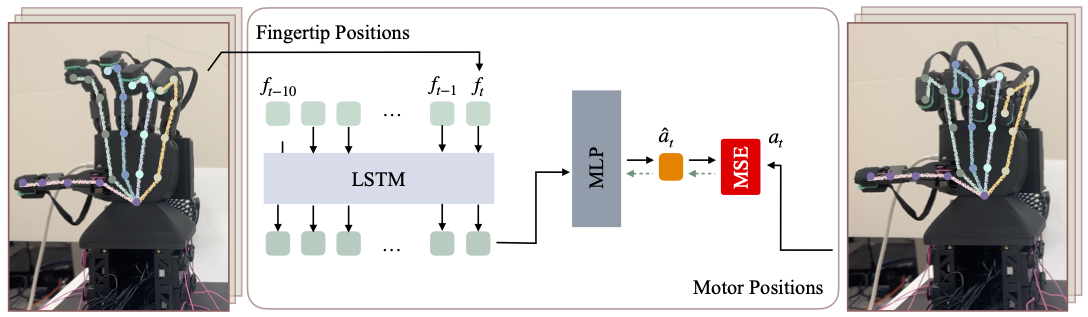
RUKA controller architecture for learning tendon-hand control. Source: RUKA repository.
RUKA-v2 adds the mobility CRAFT calls out as missing in the first version: a decoupled 2-DoF wrist and controlled finger abduction/adduction. The project page says RUKA-v2 has 16 finger and thumb DoF plus a 2-DoF wrist, costs under $2,000 in materials, and releases 3D print files, assembly instructions, controller software, videos, teleoperation code, and policy-learning examples. It reports improved teleoperation speed and success versus RUKA in user studies.
For data collection, RUKA-v2 is interesting because wrist mobility and finger splay can change the task distribution. Writing, sliding a card, reaching inside a cabinet, and grasping thin objects are not only "more dexterous" tasks. They create different action-state relationships and different failure modes.
ORCA Hand: open tactile hardware and reliability focus
ORCA is the strongest example in this set for teams that care about tactile sensing and long-duration reliability. ETH Zurich's project page describes a 17-DoF tendon-driven anthropomorphic hand with integrated tactile sensors, assembly in under 8 hours, a BOM under 2,000 CHF, poppable joints, auto-calibration, tensioning systems, and open STLs, control software, material lists, assembly instructions, and documentation.
ORCA's positioning is not just "cheap." It is reliable enough for uninterrupted dexterous task learning. The page reports continuous imitation-learning deployment for more than 7 hours, reliability experiments over thousands of cycles, and zero-shot sim-to-real reinforcement learning for in-hand ball reorientation.
That makes ORCA a useful reference for dataset buyers because it exposes a practical truth: dexterous data collection breaks hardware. Tendons stretch. Joints pop. Printed parts wear. Sensors drift. A hand that can be assembled, repaired, recalibrated, and run repeatedly may create better data than a more impressive demo hand that is hard to keep alive.
One license caveat remains: the ORCA page describes permissive MIT and Creative Commons licenses for non-commercial use. A commercial robotics team should verify which files are MIT, which are Creative Commons, and whether any tactile sensing modules or newer variants have separate terms.
BiDexHand, Amazing Hand, and other buildable projects
Beyond the CRAFT comparison set, several open projects are worth watching.
BiDexHand is a 16-DoF biomimetic dexterous hand released under MIT. Its repository includes STEP and STL CAD, Onshape, a BOM, ROS 2 Jazzy packages, Servo2040 firmware, motion shadowing, direct servo control, calibration modules, and Franka/VR teleoperation references. It is a strong candidate when ROS 2 integration and biomimetic finger structure matter.
BiDexHand preview image. Source: BiDexHand repository.
Pollen Robotics' Amazing Hand is lighter and simpler: a 4-finger, 8-DoF humanoid hand, two servos per finger, flexible shells, all actuators inside the hand, 3D-printable parts, about 400 g weight, and a cost under 200 euros. The repository includes BOM, CAD, Onshape, assembly guide, Python and Arduino demos, and Apache 2.0 software with CC BY 4.0 mechanical design. Pollen's release article is honest about the goal: moderate-cost humanoid-hand exploration on a real robot, not a proven platform for every long, complex prehensile task.

Amazing Hand mechanical overview. Source: Pollen Robotics Amazing Hand repository.
Amazing Hand basic motion demo. Source: Pollen Robotics Amazing Hand repository.
Yale OpenHand is older but still important. It is less a single five-finger humanoid hand and more an open-source family of underactuated, tendon-driven, rapid-prototyped hand designs. The project matters historically because it pushed the idea that manipulation hardware should be modifiable and reproducible. Its license is CC BY-NC 3.0, so commercial reuse needs care.
DexHand is a low-cost, open-source dexterous humanoid hand project with STLs, Onshape CAD, assembly videos, firmware, demos, and ROS 2 packages spread across The Robot Studio and IoT Design Shop resources. The original DexHand repository describes a 3D-printed hand and forearm with roughly $300 in extra components, but also shows the practical issue with community hardware: the build knowledge is distributed across repositories, videos, and maintainer notes. Its design license is CC BY-NC-SA 4.0.
GaiaHand takes a modular-joint route. The repository describes a five-fingered, 15-DoF dexterous hand built from independent hot-swappable BLDC joint modules, with CAD, PCB, firmware, Python SDK, documentation, and ROS/ROS 2 marked as coming soon. It is promising if modular repair becomes the priority, but it needs more build maturity before it should be compared with LEAP, RUKA, ORCA, or Aero as a ready data rig.
OpenBionics Robot Hands is another foundational reference. The project released files to replicate affordable, lightweight, modular robot hands and myoelectric prosthetic devices. It is more prosthetics and adaptive-grasp lineage than current humanoid robot-learning platform, but it belongs in the family tree.
How to choose for manipulation data
A practical comparison should start from the dataset you want, not from the prettiest grasp video.
If you need cheap replication, look first at Aero Hand Open, LEAP v2, Amazing Hand, and DexHand. The key diligence question is whether you can build ten of them with consistent calibration and repair time.
If you need contact-rich teleoperation, look closely at CRAFT and ORCA. CRAFT's hard-soft compliance and ORCA's tactile sensors point at different ways to make contact observable or survivable.
If you need a robot-learning baseline, LEAP, RUKA, RUKA-v2, ORCA, and BiDexHand have stronger public software stories than many one-off designs. Simulator files, retargeting code, ROS 2 packages, and example policies are not extras. They are the difference between a hand and a data system.
If you need human-hand transfer, embodiment matters. Count DoF, but also look at thumb structure, abduction/adduction, wrist mobility, DIP coupling, joint limits, and whether human teleoperation data maps naturally into the hand's action space.
If you need commercial deployment, read the licenses before collecting the data. A non-commercial CAD license may not stop you from studying the hand, but it can affect manufacturing, modified hardware, commercial kits, and how comfortable a buyer will be with a dataset collected on that setup.
What dataset sellers should document
If you are selling data collected with an open-source humanoid hand, do not list only the hand name. The hand name is not enough provenance.
A useful dataset card should include:
- Exact hand project, version, commit, license, and whether it was purchased or self-built.
- CAD or mechanical modifications, printed materials, tendon material, sensors, and replacement history.
- Firmware, SDK, ROS package, simulator version, and calibration procedure.
- Joint schema, action schema, control frequency, limits, units, and coordinate frames.
- Teleoperation method, such as glove, headset, webcam, VR retargeting, or scripted control.
- Sensor streams, including cameras, tactile data, force, tendon force, motor current, temperature, and errors.
- Failure handling, retries, repairs, discarded episodes, and operator interventions.
- Rights for commercial training, evaluation, redistribution, and derivative datasets.
That documentation is part of the product. A buyer can retarget around a known embodiment gap. They cannot easily recover missing calibration, unknown firmware, or unclear rights after the fact.
The short answer
There is no universal best open-source humanoid robot hand. Aero Hand Open is compelling for low-cost access and fleet scaling. CRAFT is compelling for compliant, contact-rich manipulation if its open release matches the project claims. LEAP remains a strong robot-learning baseline. RUKA and RUKA-v2 push tendon hands toward humanlike teleoperation and wrist/finger mobility. ORCA is the most obvious tactile and reliability-focused candidate. BiDexHand, Amazing Hand, Yale OpenHand, DexHand, GaiaHand, and OpenBionics fill out the design space.
For humanoid training data, the real ranking depends on what the hand makes measurable. Vision-only pick-and-place, fragile object handling, in-hand reorientation, tool use, slip recovery, and bimanual household tasks do not need the same hardware. The best hand for a dataset is the one whose mechanics, sensors, software, simulator, license, and documentation match the policy you want to train.
If you are buying manipulation data, ask for the hand provenance and a sample episode before you compare volume. If you are preparing a dataset for sale, make the hand stack visible through the Humanoids Data seller workflow. For teams looking for data collected on a specific embodiment, the buyer request form is the right place to describe the hand, task, and modalities you need.